精準農業方面,仍然需要創新的成本效益高的技術和新的改進的解決辦法,以便使作業和過程更加可靠、健壯和經濟可行。在這方面,機器人和自動化發揮了至關重要的作用,特別是在作物監測和特定地點作業的無人駕駛車輛方面。然而,非結構化和不規則的工作環境,如農業場景,需要關于自動駕駛車輛的定位和運動控制的具體解決方案。

本文提出了一種可靠、經濟有效的單目視覺測程系統,該系統可用于農業地形上履帶式車輛的定位和導航。本工作的主要貢獻是設計和實現了一種基于互相關方法的增強圖像處理算法。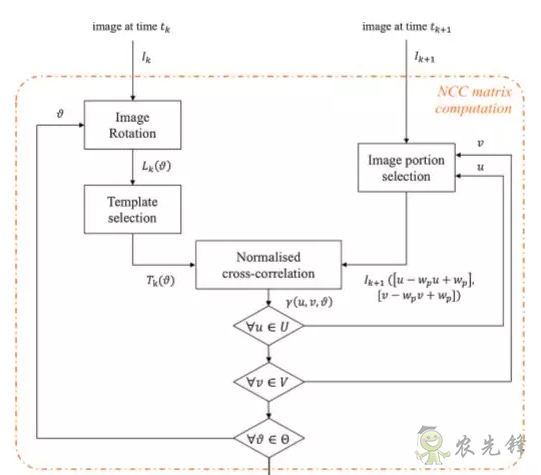

它是專門為使用一個簡化的硬件和一個低復雜度的機械系統而開發的,并且不影響性能。通過提供子像素結果,該算法可以利用低分辨率圖像,從而在較短的計算時間內獲得較高的運動估計精度。通過對幾種地形的現場試驗,驗證了該方法的有效性和適用于精確農業自動控制方案的適用性。
來源:
Zaman S, Comba L, Biglia A, et al. Cost-effective visual odometry system for vehicle motion control in agricultural environments[J]. Computers and Electronics in Agriculture, 2019, 162: 82-94.
圖1 本文所述機器人原型
本文提出了一種可靠、經濟有效的單目視覺測程系統,該系統可用于農業地形上履帶式車輛的定位和導航。本工作的主要貢獻是設計和實現了一種基于互相關方法的增強圖像處理算法。
圖2 增強VO算法框圖
它是專門為使用一個簡化的硬件和一個低復雜度的機械系統而開發的,并且不影響性能。通過提供子像素結果,該算法可以利用低分辨率圖像,從而在較短的計算時間內獲得較高的運動估計精度。通過對幾種地形的現場試驗,驗證了該方法的有效性和適用于精確農業自動控制方案的適用性。
來源:
Zaman S, Comba L, Biglia A, et al. Cost-effective visual odometry system for vehicle motion control in agricultural environments[J]. Computers and Electronics in Agriculture, 2019, 162: 82-94.
農先鋒網聲明:凡資訊來源注明為其他媒體來源的信息,均為轉載自其他媒體,并不代表本網站贊同其觀點,也不代表本網站對其真實性負責。您若對該文章內容有任何疑問或質疑,請立即與網站(www.shdysy.cn)聯系,本網站將迅速給您回應并做處理。
聯系郵箱:3267146135@qq.com
聯系郵箱:3267146135@qq.com